
Updated doc on avatar model-checker
Showing
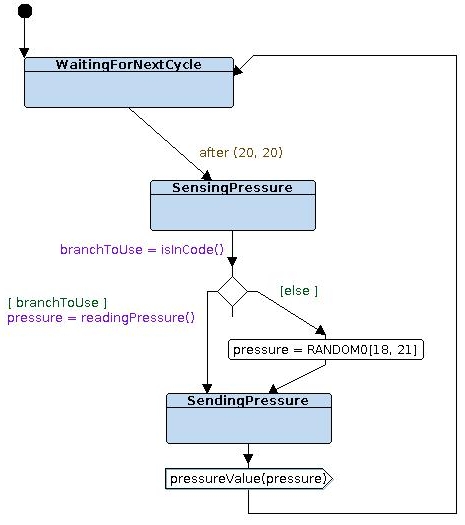
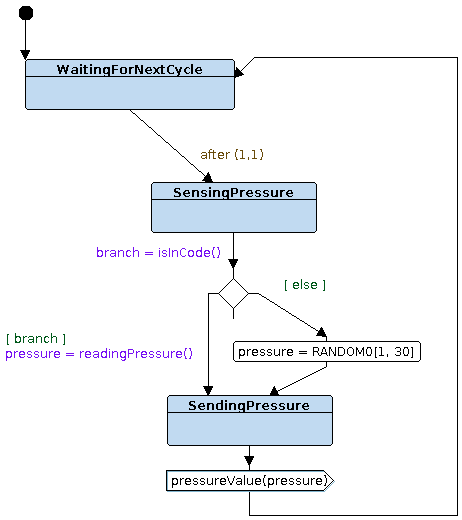
- doc/avatarmodelchecker/images/PressureController.png 0 additions, 0 deletionsdoc/avatarmodelchecker/images/PressureController.png
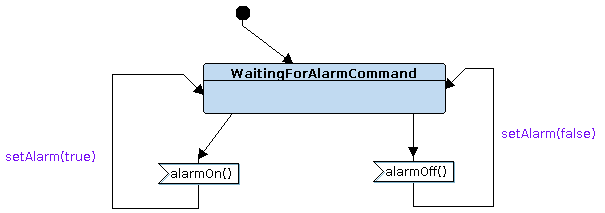
- doc/avatarmodelchecker/images/alarmactuator.jpg 0 additions, 0 deletionsdoc/avatarmodelchecker/images/alarmactuator.jpg
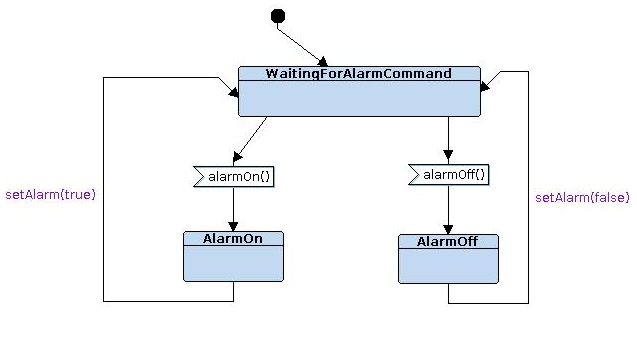
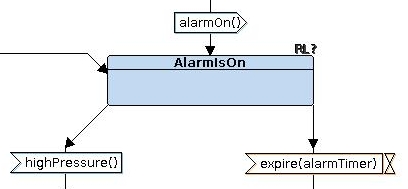
- doc/avatarmodelchecker/images/alarmactuator.png 0 additions, 0 deletionsdoc/avatarmodelchecker/images/alarmactuator.png
- doc/avatarmodelchecker/images/alarmmanager.jpg 0 additions, 0 deletionsdoc/avatarmodelchecker/images/alarmmanager.jpg
- doc/avatarmodelchecker/images/maincontroller.jpg 0 additions, 0 deletionsdoc/avatarmodelchecker/images/maincontroller.jpg
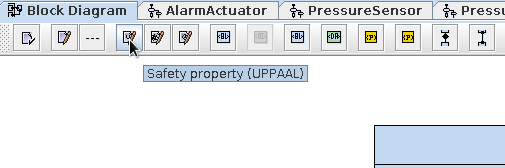
- doc/avatarmodelchecker/images/modelcheckerwindow.jpg 0 additions, 0 deletionsdoc/avatarmodelchecker/images/modelcheckerwindow.jpg
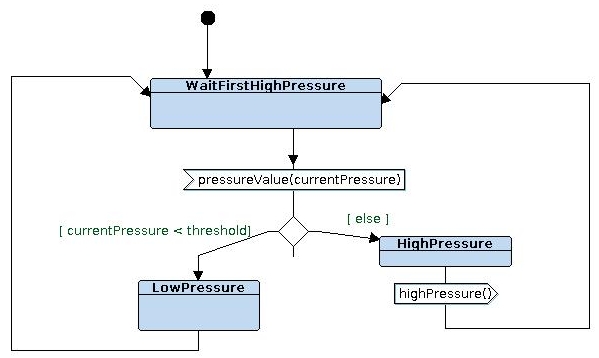
- doc/avatarmodelchecker/images/pressuresensor.jpg 0 additions, 0 deletionsdoc/avatarmodelchecker/images/pressuresensor.jpg
- doc/avatarmodelchecker/images/pressuresensor.png 0 additions, 0 deletionsdoc/avatarmodelchecker/images/pressuresensor.png
- doc/avatarmodelchecker/images/rl_exe.jpg 0 additions, 0 deletionsdoc/avatarmodelchecker/images/rl_exe.jpg
- doc/avatarmodelchecker/images/rl_grey.jpg 0 additions, 0 deletionsdoc/avatarmodelchecker/images/rl_grey.jpg
- doc/avatarmodelchecker/images/safety.png 0 additions, 0 deletionsdoc/avatarmodelchecker/images/safety.png
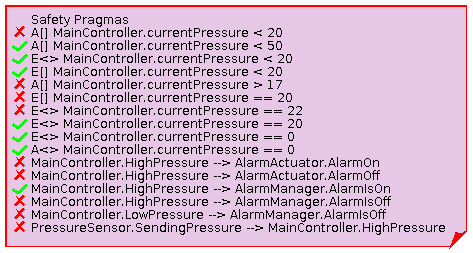
- doc/avatarmodelchecker/images/safety_result.png 0 additions, 0 deletionsdoc/avatarmodelchecker/images/safety_result.png
- doc/avatarmodelchecker/ttool_avatarmodelchecker.tex 133 additions, 10 deletionsdoc/avatarmodelchecker/ttool_avatarmodelchecker.tex
{kind=link}

9.5 KiB
{kind=link}
49.3 KiB
{kind=link}
2.67 KiB
{kind=link}

78.2 KiB
{kind=link}
56.9 KiB
{kind=link}

263 KiB
{kind=link}
62.6 KiB
{kind=link}
4.92 KiB
doc/avatarmodelchecker/images/rl_exe.jpg
0 → 100644
{kind=link}

26 KiB
doc/avatarmodelchecker/images/rl_grey.jpg
0 → 100644
{kind=link}
27.4 KiB
doc/avatarmodelchecker/images/safety.png
0 → 100644
{kind=link}
10 KiB
{kind=link}
17.3 KiB